
I am currently a second-year Ph.D. student majoring in Statistics at School of Data Science, Fudan University & Shanghai Innovation Institute (Sii). I am honored to be advised by Prof. Yanwei Fu and Prof. Shouyan Wang. Previously, I received the Bachelor's degree (June 2022) in Software Engineering from Nanjing University of Information Science and Technology (NUIST), under the supervision of Prof. Xiaolong Xu.
My research interests span Embodied Intelligence and Computational Neuroscience, e.g., robotic manipulation based on 3D computer vision, unified modeling of cognition and behavior. At present, I devote to enhancing the robotic perception capabilities through 3D reconstruction.
In recent years, I would like to thank Dr. Haitao Lin and Dr. Xuelin Qian for their support during my research, as well as my co-workers.
Email: wangty25@m.fudan.edu.cn
News
- [2026/02] 🎉 One paper gets accepted to ICRA 2026, which is our first attempt at EEG-driven human-robot interaction.
- [2025/08] 🎉 FastUMI gets accepted to CoRL 2025.
- [2025/02] 🎉 Two papers get accepted to CVPR 2025.
- [2025/02] We won the third prize in the first Global Lerobot Embodied Intelligence Hackathon.
- [2025/01] 🎉 One paper gets accepted to ICRA 2025.
- [2024/10] Excited to announce ⚡️Fast-UMI, a scalable and hardware-independent universal manipulation interface (Open Source Project).
- [2024/09] 🎉 One paper gets accepted to CoRL 2024.
- [2024/08] I have joined the Shanghai AI Lab as an Embodied AI Intern, aiming to conduct research on learning for manipulation. Looking forward to this new journey! [Project completed in 2024/11]
- [2024/06] 🎉 One paper gets accepted to IROS 2024.
- [2023/12] I have joined the Shanghai Computer Society.
- [2023/06] I started my research on interactive general robotic grasping in collaboration with Dr. Shuang Wu from Huawei Noah's Ark Lab, and I am grateful for some of his guidance. [Project completed in 2024/06]
Research
* denotes equal contribution
 Graph Navier–Stokes Networks
Graph Navier–Stokes Networks
Zexing Zhao, Guangsi Shi, Yu Gong, Tianyu Wang, Shirui Pan, Hongye Cheng, Yuxiao Li
KDD 2026
Paper •
Code
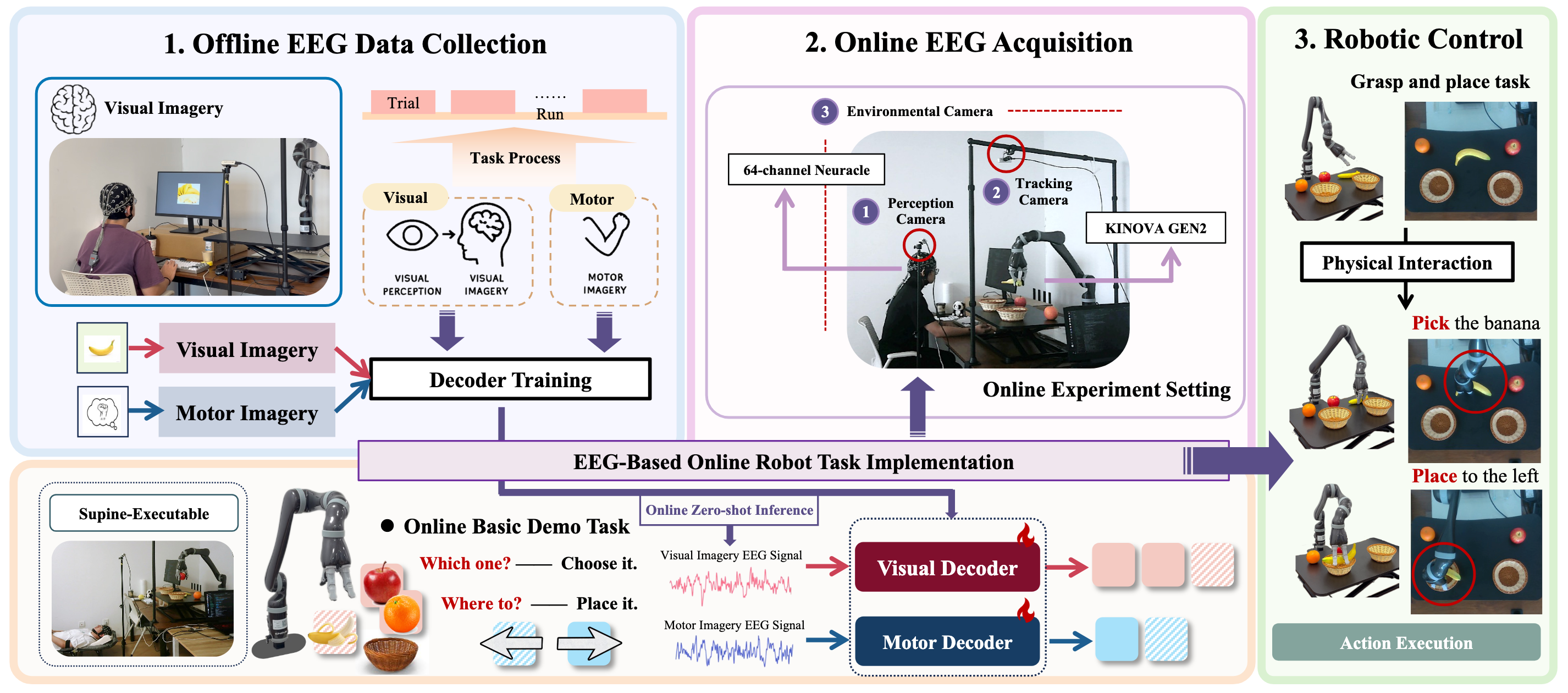 Robotic Grasping and Placement Controlled by EEG-Based Hybrid Visual and Motor Imagery
Robotic Grasping and Placement Controlled by EEG-Based Hybrid Visual and Motor Imagery
Yichang Liu, Tianyu Wang, Ziyi Ye, Yawei Li, Yu-Gang Jiang, Shouyan Wang, Yanwei Fu
ICRA 2026
Webpage •
Paper •
Code
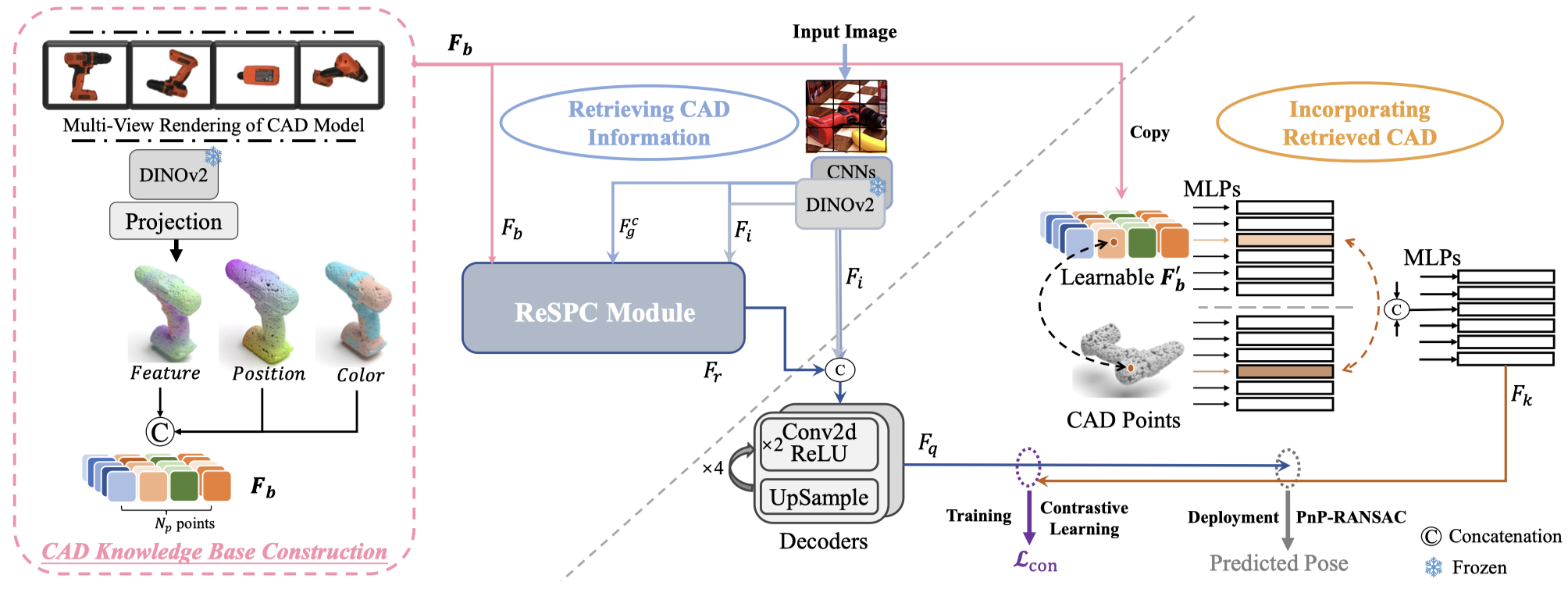 RAG-6DPose: Retrieval-Augmented 6D Pose Estimation via Leveraging CAD as Knowledge Base
RAG-6DPose: Retrieval-Augmented 6D Pose Estimation via Leveraging CAD as Knowledge Base
Kuanning Wang, Yuqian Fu, Tianyu Wang, Yanwei Fu, Longfei Liang, Yu-Gang Jiang, Xiangyang Xue
IROS 2025
Webpage •
Paper •
Code
 HOP: Heterogeneous Topology-based Multimodal Entanglement for Co-Speech Gesture Generation
HOP: Heterogeneous Topology-based Multimodal Entanglement for Co-Speech Gesture Generation
Hongye Cheng*, Tianyu Wang*, Guangsi Shi, Zexing Zhao, Yanwei Fu
CVPR 2025
Webpage •
Paper •
Code
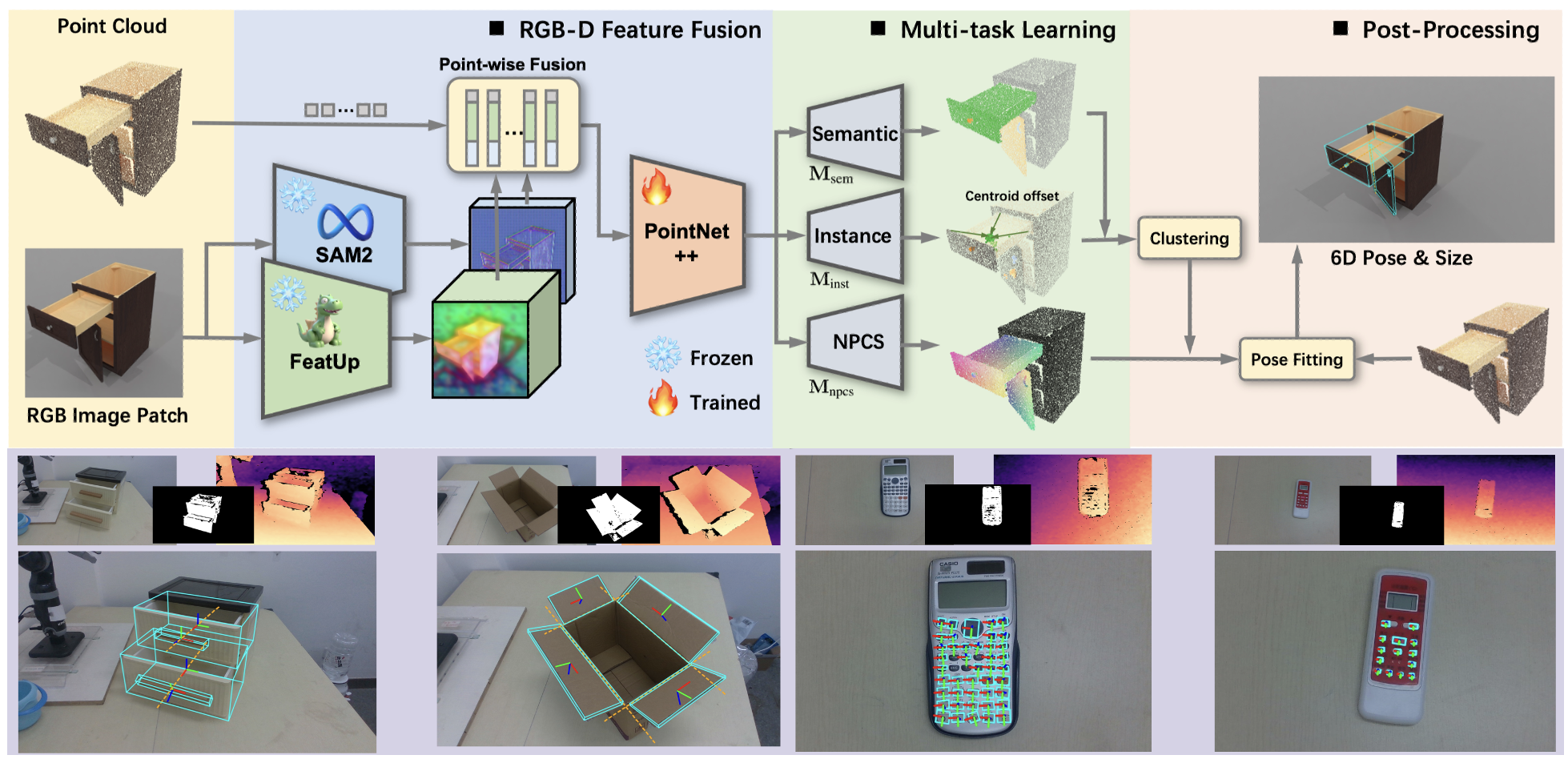 CAP-Net: A Unified Network for 6D Pose and Size Estimation of Categorical Articulated Parts from a Single RGB-D Image
CAP-Net: A Unified Network for 6D Pose and Size Estimation of Categorical Articulated Parts from a Single RGB-D Image
Jingshun Huang*, Haitao Lin*, Tianyu Wang, Yanwei Fu, Xiangyang Xue, Yi Zhu
CVPR 2025
Webpage •
Paper •
Code
 You Only Estimate Once: Unified, One-stage, Real-Time Category-level Articulated Object 6D Pose Estimation for Robotic Grasping
You Only Estimate Once: Unified, One-stage, Real-Time Category-level Articulated Object 6D Pose Estimation for Robotic Grasping
Jingshun Huang, Haitao Lin, Tianyu Wang, Yanwei Fu, Yu-Gang Jiang, Xiangyang Xue
ICRA 2025
Webpage •
Paper •
Code
 TaMMa: Target-driven Multi-subscene Mobile Manipulation
TaMMa: Target-driven Multi-subscene Mobile Manipulation
Jiawei Hou*, Tianyu Wang*, Tongying Pan*, Shouyan Wang, Xiangyang Xue, Yanwei Fu
CoRL 2024
Webpage •
Paper •
Code
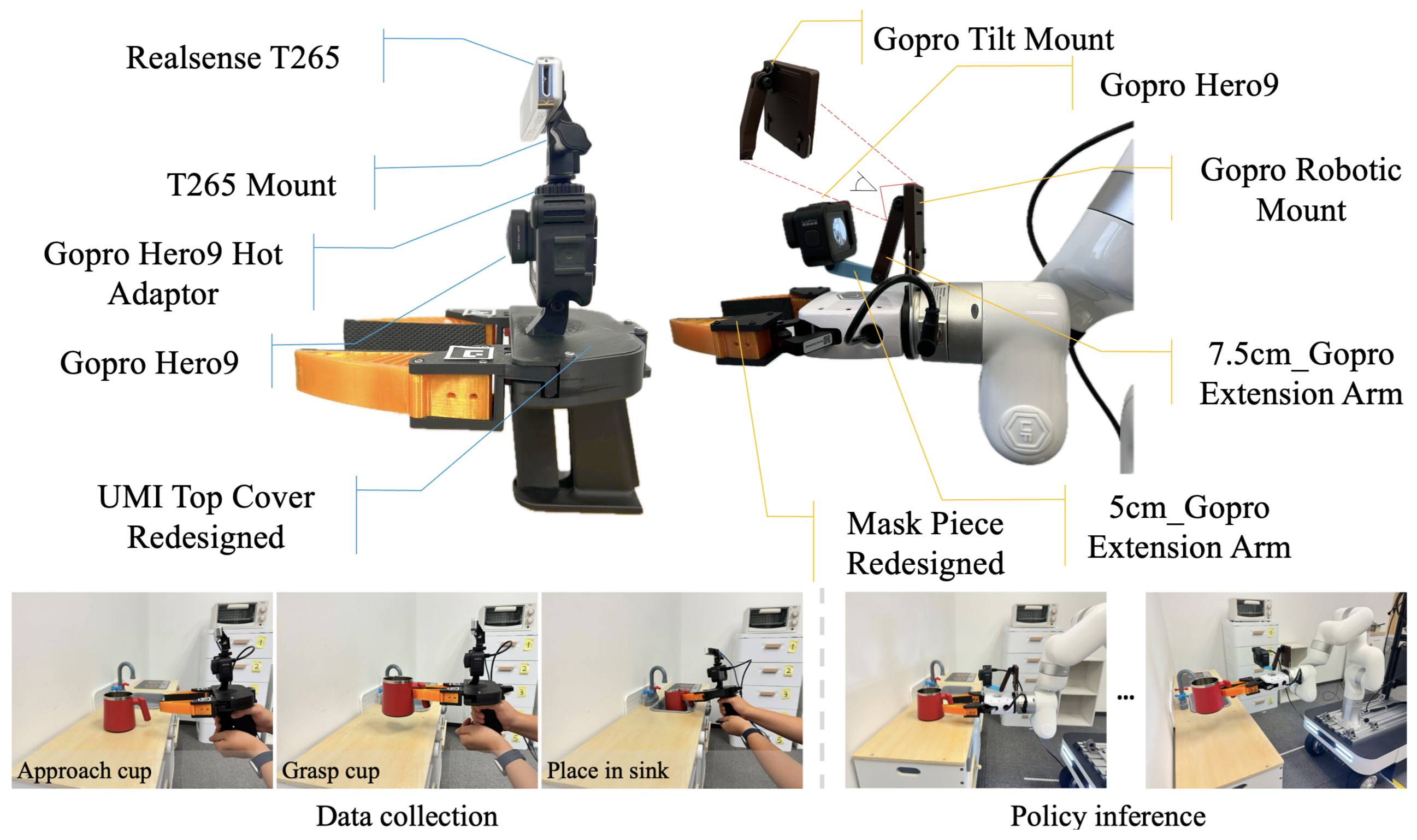 Fast-UMI: A Scalable and Hardware-Independent Universal Manipulation Interface
Fast-UMI: A Scalable and Hardware-Independent Universal Manipulation Interface
Ziniu Wu*, Tianyu Wang*, Zhaxizhuoma*, Chuyue Guan, Zhongjie Jia, Dong Wang, Nieqing Cao, Yan Ding, Bin Zhao, Xuelong Li
Pre-print 2024
Webpage •
Paper •
Supplementary (released) •
Code
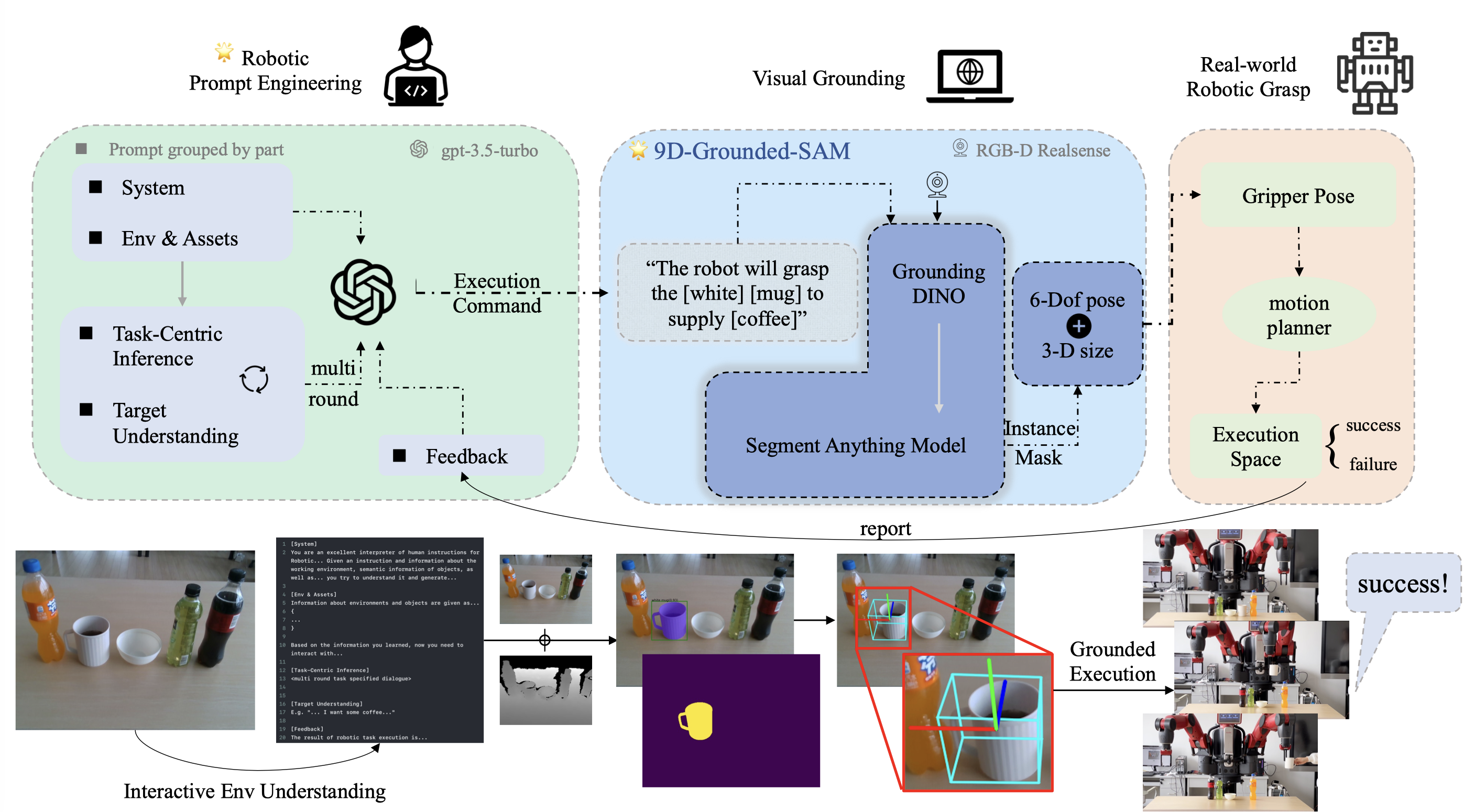
 Polaris: Open-ended Interactive Robotic Manipulation via Syn2Real Visual Grounding and Large Language Models
Polaris: Open-ended Interactive Robotic Manipulation via Syn2Real Visual Grounding and Large Language Models
Tianyu Wang, Haitao Lin, Junqiu Yu, Yanwei Fu
IROS 2024
Webpage •
Paper •
Code
 WALL-E: Embodied Robotic WAiter Load Lifting with Large Language Models
WALL-E: Embodied Robotic WAiter Load Lifting with Large Language Models
Tianyu Wang, Yifan Li, Haitao Lin, Jingshun Huang, Xiangyang Xue, Yanwei Fu
Pre-print 2023
Webpage •
Paper •
Code
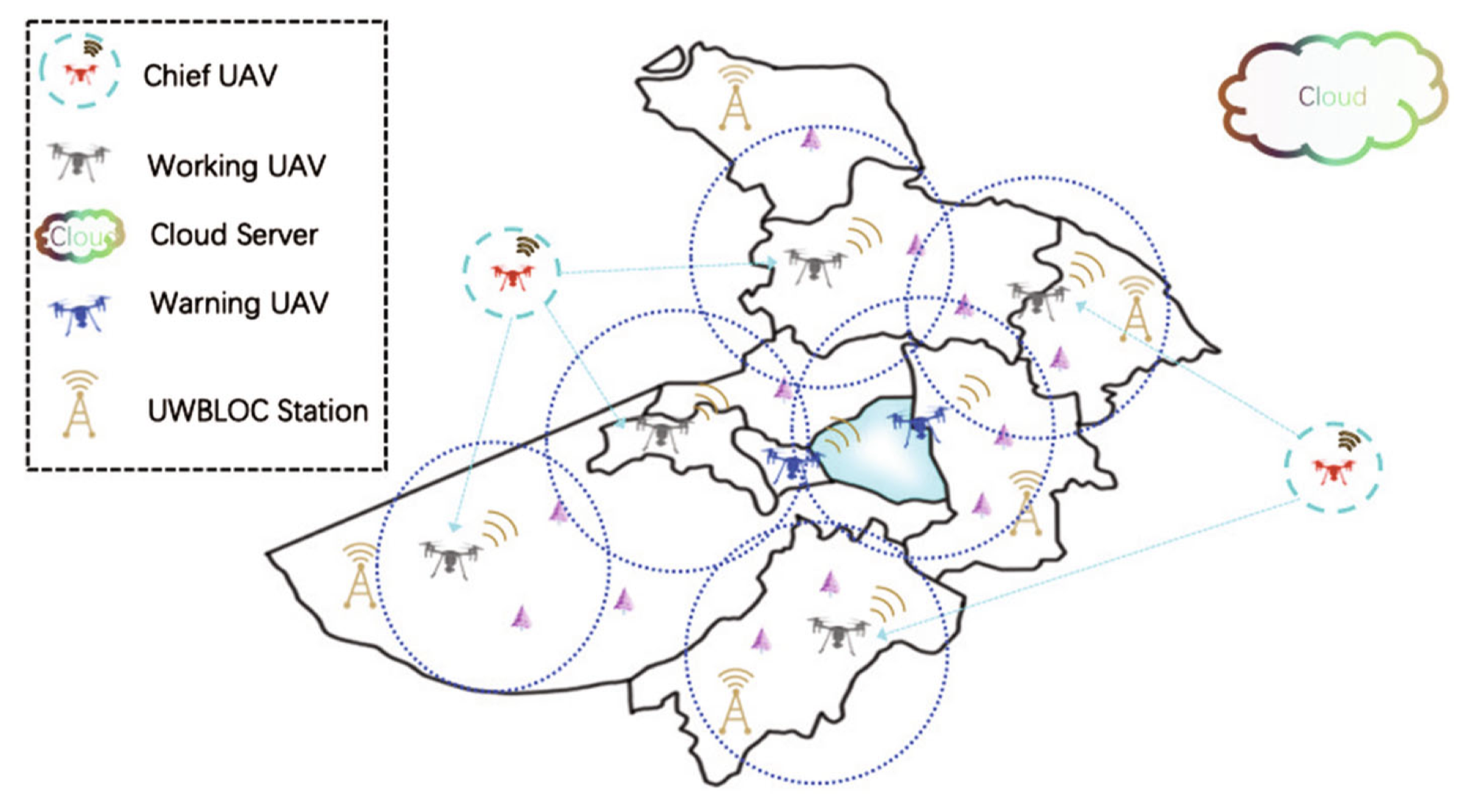 UAV deployment with grid modeling and adaptive multiple pruning search in complex forest scenarios
UAV deployment with grid modeling and adaptive multiple pruning search in complex forest scenarios
Tianyu Wang, Wei Gu
Wireless Networks 2021
Paper
Projects
FoldingBot backed by Spirit Moz1: Leveraging an end-to-end VLA model to fold T-shirts of diverse colors and varying degrees of wrinkles, with generalization achieved through several hundred teleoperated demonstrations.
Second prize in the Intelligent Robot Developer Competition (Robo Mind) - 2026
TeaBot backed by LeRobot: The core action sequence of making tea, including pouring tea leaves, adding water, and stirring, is attempted using a general robotic arm.
Third prize in the first Global Lerobot Embodied Intelligence Hackathon, hosted by Seeed Studio - 2025
Experience
Fudan University (FDU)
2022.09 - Present • Postgraduate student
Research Advisor: Prof. Yanwei Fu & Prof. Shouyan Wang
Shanghai Innovation Institute (Sii)
2025.09 - Present • Postgraduate student
Research Advisor: Prof. Yanwei Fu
Ant Group - Robbyant
2026.03 - Present • Research Intern
Mentor: Dr. Kecheng Zheng, Dr. Wei Wu and Fangjing Wang
ONESTAR Robotics
2025.05 - 2025.10 • Joint Laboratory Algorithm Intern
Research Topic: Robotic Foundation Model & Open-ended Real-world Policy Benchmark
Shanghai AI Laboratory
2024.08 - 2024.11 • Research Intern
Mentor: Dr. Yan Ding
Research Topic: UMI Collection–Training–Inference Paradigm & AnyGrasp with Semantic Grounding
University of Cambridge
2019.01 - 2019.03 • Visiting student at Hughes Hall
Cambridge Future Scientists Winter Programme
Programme Advisor: Dr. Li Peng
Nanjing University of Information Science and Technology (NUIST)
2018.09 - 2022.06 • Undergraduate student
GPA ranking: 2/163
Research Advisor: Prof. Xiaolong Xu
Selected Awards and Honors
- 2021: National Scholarship (Highest Honor for Undergraduates in China, 8000RMB¥)
- 2021: President Scholarship (Highest Honor for Undergraduates in NUIST, 10000RMB¥)
- 2021: Outstanding Students of Jiangsu Province, China
- 2021: First Prize in the National Finals of the China College Student Service Outsourcing Innovation and Entrepreneurship Competition
- 2020: National Scholarship (Highest Honor for Undergraduates in China, 8000RMB¥)
- 2020: President Scholarship (Highest Honor for Undergraduates in NUIST, 10000RMB¥)
- 2020: Silver Award in the Provincial Finals of “Internet +” College Students Innovation and Entrepreneurship Competition
- 2020: Second Prize in Jiangsu Provincial College Student Robot Competition
© 2026 Tianyu Wang